
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 24-06-2006, 01:17 AM
24-06-2006, 01:17 AM
|
#31 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em ko hiểu ý anh F như thế nào nhưng trong module cs thì relay chỉ để đảo chiều động cơ, còn PWM là em dùng con FET ở dưới. Mạch này em dùng đk vị trí động cơ
Còn nguồn encoder thi trên board điều khiển em có làm jump để cắm nguồn cho encoder. |

|

|
|
24-06-2006, 01:38 AM
|
#32 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Uhm, đúng là anh xem lầm, vì anh không để ý kỹ theo thói quen thiết kế thì anh không làm vậy, cho nên anh nhìn anh tưởng em dùng Relay để kích. Anh phải trả lời bài nhiều, nên đôi khi nhìn thoáng qua không chú ý, vả lại khi có ý định viết về vấn đề một vài ý để thiết kế bộ điều khiển, nên khi nhìn lướt qua sẽ gặp sai sót.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 24-06-2006 lúc 01:41 AM. |
|
|
|
|
24-06-2006, 01:59 PM
|
#33 |
|
Đệ tử 3 túi

Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Đây là con động cơ có số xung lớn nhất (504 xung) mà em kiếm được ở chợ trời! Mỗi tội nó bé tẹo! (xem ảnh) Các bạn có thể tìm nó với giá chỉ 40k. Tuy nhiên loại này hơi hiếm.
Mạch điều khiển em làm sử dụng AVR, cầu H sử dụng L298. Con ATMEGA8535 em sử dụng không đủ khả năng thực hiện đủ 3 vòng điều khiển, ADC của nó quá chậm (max 15.7ksps) có lẽ cần chuyển qua dsPIC hoặc PIC4331 thì dễ hơn   thay đổi nội dung bởi: falleaf, 24-06-2006 lúc 02:32 PM. |
|
|
|
|
24-06-2006, 02:50 PM
|
#34 |
|
Đệ tử 6 túi

Tham gia ngày: Jun 2005
Bài gửi: 141
: |
vừa ra trợ giời kiếm về con động cơ làm dự án với bác falleaf đây. Nhưng mà tìm mãi trên mạng không thấy datasheet của nó. Không biết xác định chân cẳng của nó ra sao. Đây là các thông số ghi trên nhãn động cơ:
DC motor Hitachi type D06D304E Volts: 38 Outphut: 53W Ampe: 1.9 Rating : cont RPM: 3700 INS. CL. B Ricoh: P/N Encoder: 240 P/R Từ mạch encoder thấy có 6 dây ra với 6 màu khác nhau. Còn từ động cơ có 2 dây ra (màu đen và đỏ). Hai dây này là nối với nguồn DC. Hôm nay chưa kiếm được cái máy ảnh để chụp lên cho anh em xem. Các bác giúp em tìm cái thông tin về động cơ này với. Không biết 6 dây ra ở encorder là thế nào đây? |
|
|
|
|
24-06-2006, 03:04 PM
|
#35 |
|
Đệ tử 3 túi
Tham gia ngày: Jul 2005
Bài gửi: 47
: |
Một số vấn đề em biết về điều khiển số động cơ:
1. Quan trọng nhất: Tìm được hàm truyền của động cơ. Với động cơ 1 chiều, đã có nhiều báo cáo về phương pháp tìm hàm truyền của động cơ, quy chung lại có 3 phương pháp: a. Đo trực tiếp các thông số của động cơ, Ra, La, M, Kb, Ke.... Phương pháp này đòi hỏi thiết bị đo khá hiện đại (như các oscillo số)... b. Vẽ đáp ứng bước nhảy h(t) của đầu ra mong muốn, chẳng hạn như vận tốc góc---điện áp vào, dòng điện----điện áp vào. Cách này đơn giản hơn! c. Xây dựng đặc tính tần: Chẳng hạn như cho vào đc 1 điện áp sin rồi đo đáp ứng (vận tốc góc, dòng điện) từ đó tính ra hàm truyền. Phương pháp a là đơn giản nếu có thiết bị, phương pháp b thì phức tạp hơn vì cần xây dựng mạch phần cứng đủ mạnh (ADC đủ nhanh chẳng hạn) để thu thập số liệu. Phương pháp c chưa nghĩ bao j nên không có ý kiến Hàm truyền vận tốc góc phụ thuộc điện áp vào là một khâu PT2. Hàm truyền dòng điện - điện áp là khâu PT1. Sau khi tính được hàm truyền trong miền Laplace, ta tính hàm truyền trong miền Z (rời rạc, và phụ thuộc vào chu kì trích mẫu T) 2. Phương pháp điều khiển. Phương pháp điều khiển tốt nhất là sử dụng cấu trúc vòng phân cấp. với 3 vòng điều khiển. - Vòng điều khiển dòng (điều khiển momen) là vòng điều khiển trong cùng có động học nhanh nhất, yêu cầu chu kì đk nhỏ nhất (cỡ 100us-400us). - Vòng điều khiển vận tốc đứng thứ 2 với chu kì gấp 1 số nguyên lần vòng thứ nhất (thường là 10 lần) - Vòng điều khiển vị trí là vong ngoài cùng, yêu cẫu chu kì điều khiển lớn nhất và cũng gấp 1 số nguyên lần vòng đk vận tốc. Chu kì trích mẫu của các vòng là khác nhau nhưng chúng tỉ lệ với nhau. Chu kì này sẽ quyết định hàm truyền rời rạc của đối tượng trong vòng điều khiển. Vòng điều khiển dòng có thể sử dụng khâu điều chỉnh Dead-beat (tối ưu cấu trúc). Vòng điều khiển vận tốc có thể dùng thiết kế tối ưu module số (tối ưu tham số) Vòng điều khiển vị trí tương tự vòng điều khiển vận tốc. Các application note về điều khiển động cơ (nhiều nhất là của Micorchip) đều chỉ hướng dẫn điều khiển PID vòng điều khiển vận tốc. Chú ý rằng chu kì trích mẫu là một yếu tố vô cùng quan trọng trong bài toán điều khiển số. Với động cơ, chu kì trích mẫu không những phụ thuộc vào tốc độ tính toán của VDK mà còn phụ thuộc vào độ phân giải của Encoder cũng như vận tốc quay của động cơ. Các encoder 500 xung là không đủ để đảm bảo chất lượng điều khiển. Ví dụ thế này: Con động cơ của em có encoder 500 xung, vận tốc không tải ở 12V là 2500v/phút. Mạch điều khiển đã nhân đôi xung từ Encoder là được 1000 xung/vòng. như vậy với vòng điều khiển vận tốc chỉ 4ms ta đếm được cùng lắm là 167 xung! Sai số điều khiển 1 xung sẽ ứng với 2500/167=15v/phút. Một con số tương đối lớn. Trong trường hợp này đảm bảo nhất là sử dụng phương pháp đo chu kì xung, tuy nhiên nếu áp dụng sẽ tương đối phức tạp và khi ấy bộ QEI của PIC chỉ dùng cho vòng điều khiển Vị trí thôi .Để thực hiện được vòng điều khiển dòng, ta cần 1 ADC (tối thiểu 10bit). Sử dụng ADC onchip là một giải pháp tốt. ADC của PIC có thể đáp ứng được điều này vì có thời gian biến đổi tương đối nhỏ (10us của PIC16, 5us của PIC18 và 2us của dsPIC). ADC 10 bit của AVR có thời gian biến đổi đến 67us. Các chíp PIC đời cao như 18F2331, 18F4331, dsPIC2010.... là lý tưởng để giải quyết thấu đáo vấn đề điều khiển số động cơ 1 chiều. Về khâu chấp hành: Phương pháp thường được sử dụng nhất là điều khiển PWM động cơ. Tuy nhiên sử dụng kiểu PWM nào: - PWM không đảo chiều có đường đi cho dòng điện hãm - PWM đảo chiều kiểu một cực - PWM đảo chiều một cực bị hạn chế - PWM đảo chiều kiểu diode Phương pháp đầu là kiểu điều khiển động cơ bằng 1 FET kiểu này cho đặc tính cơ của động cơ không tốt lắm. 3 Phương pháp sau là các cách điều khiển khác nhau của 1 mạch cầu H, trong đó điều khiển PWM kiểu một cực thường được sử dụng nhất (chẳng hạn với L298 khi cho 1 chân là PWM, 1 chân là DIR). Điều khiển PWM kiểu diode cho đáp ứng tốt nhất với động cơ, đặc biệt ổn định ở dải vận tốc thấp, nhưng gây tổn hao lớn cho mạch công suất (đưa 2 xung đối nhau vào 2 chân điều khiển của L298). Tần số PWM theo đa số các tài liệu và cả theo bác falleaf thì tốt nhất là nằm trong khoảng 16-25kHz. Ở tần số này các optocouper kiểu như P521 hay 4N35 không sử dụng được. Vì thế không được sử dụng chúng để cách ly. Hình đính kèm là điện áp đo được giữa 2 đầu động cơ mà em sử dụng khi băm bằng L298 ở tần số 33kHz. Và xung vào từ encoder (xung kênh A và xung sau khi qua mạch nhân 2)   thay đổi nội dung bởi: falleaf, 24-06-2006 lúc 07:26 PM. |
|
|
|
|
24-06-2006, 08:03 PM
|
#36 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Điện áp vào tối đa 38VDC Công suất: 53Watt Vận tốc tối đa: 3700 vòng/phút (Rounds Per Minute - RPM) Encoder độ phân giải 240 xung/vòng (Pulses Per Revolution - P/R hoặc PPR) Dòng lớn nhất khoảng 1.9A, nhưng dòng hoạt động khoảng 1.4A 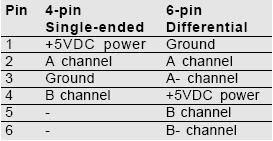 Đây là cách nối dây 6 chân. Với loại encoder 5 chân, thì không có A-, B- mà nó sẽ là chân Z. Lưu ý là, theo cách nối trên, thì không biết thứ tự nhé, chỉ có cách kiểm tra thứ tự chân thôi, chứ không phải loại nào cũng giống loại nào. F chỉ đưa cái hình này ra để mọi người biết nó gồm những chân nào thôi. Đây là thí dụ cho loại 5 chân chân Z hay chân Index, dùng để đếm số vòng quay  Ở đây, chúng ta chỉ sử dụng, VDD, GND, A và B, không dùng A-, B-. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 24-06-2006 lúc 08:33 PM. |
|
|
|
|
|
24-06-2006, 10:08 PM
|
#37 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Cảm phiền các bạn nào tham gia đề tài, có thể cung cấp tên và địa chỉ cụ thể cho F và cho mọi người biết, để F có thể gửi PIC cho các bạn làm thực hành. Các bạn nào không cần F gửi PIC để thực hành mà có thể tự mua được thì không cần cung cấp thông tin cá nhân cũng được.
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
24-06-2006, 10:23 PM
|
#38 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
24-06-2006, 10:40 PM
|
#39 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em có 1 cái động cơ cua yaskawa
TYPE UGRMEM 02MTV31 ->100W Encoder UTOPI 100SK ->1000xung, 8 dây S/N 235048-1-1 Kiếm datasheet trên trang yaskawa chỉ thấy UGRMEM -02SA.. va -02MA.. ko thấy loại MTV31 này. Encoder yaskawa có 2 loại sử dụng nguồn 12V và 5V, ko kiếm được datasheet nên em ko biết xài nguồn nào, nguồn 5V thì xung ra low là 2V max là 2.2V, bó tay. Hình thì y như cái hình em post lúc đầu. |
|
|
|
|
24-06-2006, 10:49 PM
|
#40 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
datasheet 2 loại động cơ em từng xài qua yaskawa và tre của tamagawa. Hy vọng giúp ích cho mọi người
|
|
|
|
|
24-06-2006, 11:04 PM
|
#41 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Để kiểm tra điện áp vào của động cơ, thì chúng ta làm theo cách, từ từ nâng điện áp ngõ vào của động cơ lên. Vd từ 5V đến 24V hoặc 48V. Khi nào thấy dù có nâng vận tốc lên cao mà động cơ vẫn không tăng tốc được nữa thì chúng ta dừng lại. Điện áp ngõ vào sẽ là mức điện áp thông dụng dùng cho động cơ. Những mức đó là: 5V, 6V, 7.2V, 9V, 12V, 18V, 24V, 38V, 40V, 48V, và 60V.
Khi tăng dần điện áp ngõ vào, chúng ta sẽ xác định được động cơ của chúng ta rơi vào mức nào. Nhớ đừng tăng điện áp lên quá cao và đột ngột, dùng biến trở vặn để tăng từ từ thôi. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
25-06-2006, 07:52 PM
|
#42 | |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Trích:
Đây là ở HCM, sorry là F không có thông tin mua bán ở HN, bạn nào ở HN, có thể giới thiệu một vài địa điểm để giúp các bạn thực hành không? Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
26-06-2006, 01:09 AM
|
#43 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 51
: |
Chào mọi người.
Hôm nay ra chợ động cơ trên đường Vĩnh Viễn đáng tiếc ra lúc 2h nên các cửa hàng đóng của. Buồn thiệt. Chỉ kiếm được cái động cơ dùng cho máy in khá cồng kềnh 400 xung. HEHE hôm nay có địa chỉ của anh Falleaf chiều mai lên đây mua thử. Cám ơn anh Falleaf nhiều nha Chúc mọi người ngủ ngon. |
|
|
|
|
26-06-2006, 02:57 AM
|
#44 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Hôm nay nói đôi chút, có vẻ hơi thừa về mạch cầu H dùng để đảo chiều động cơ. Ai cũng biết rằng, nếu như dùng một cái bình acquy, lấy dây (+) và dây (-) nối vào hai đầu động cơ, thì động cơ sẽ chạy, nếu đảo (+) thành (-) và ngược lại, thì động cơ sẽ quay theo chiều ngược lại.
Vấn đề là, trong một mạch điện tử, thì người ta không thể nào gỡ hai sợi dây ra và đấu ngược lại để đảo chiều được, cho nên, người ta nghĩ ra giải pháp như sau:  Làm như vậy, chỉ cần đóng mở các khóa, thành từng cặp, như hình sau, thì có thể đảo chiều của (+) và (-) (Nguồn và mass.)  Nếu đóng cặp khoá như hình trên, dòng điện sẽ chạy từ trái sang phải của động cơ, và nếu mở cặp này ra, và đóng cặp còn lại, thì dòng điện sẽ chạy từ phải sang trái. Như vậy có nghĩa là chúng ta đã đảo chiều được cho động cơ. Như vậy, nguyên tắc của mạch cầu H không có gì quá phức tạp. Vấn đề phức tạp ở chỗ, chính là các cái khoá đó. Chúng ta tạm coi, các cái khoá là như nhau, việc đóng mở và nguyên lý hoạt động của mỗi khoá là giống nhau, chúng ta sẽ chỉ quan tâm vấn đề của một cái khoá thôi. Hãy hình dung lại một lần nữa, một cái khoá, nếu như dùng tay người đóng thì đơn giản, nhưng vấn đề là, đây là một cái khoá điện tử. Nếu một cái khoá cơ, thì chúng ta thấy rằng, sợi dây đồng, dây chì, hoặc vật liệu làm cái khoá, có thể vô tư chịu được dòng điện chạy qua mạch và qua động cơ. Nhưng với một cái khoá điện tử, làm sao đảm bảo đựơc dòng điện chạy qua cái khoá đó. Dòng điện chạy qua khoá, chính là dòng điện chạy qua động cơ. Cho nên, nếu động cơ có dòng càng lớn, thì tất nhiên cái khoá phải càng "to". Cái khoá to ở đây, có nghĩa là phải đảm bảo dòng đi qua khoá càng lớn. Ví dụ đây là một giải pháp??  Điểm thử hai, đó là nếu chúng ta có một cái khoá cơ, chúng ta cầm tay đóng ngắt thì đơn giản, nhưng mà bây giờ chúng ta đang muốn dùng một con PIC để đóng ngắt. Điện áp ra từ PIC chỉ có 5V, và dòng chỉ có 20mA. Như vậy, cái khoá điện tử này phải được kích đóng mở bằng điện áp 5V và dòng 20mA. Sau đó người ta thử khoá điện tử??  Điểm thứ ba, chúng ta thấy rằng, chúng ta yêu cầu một tốc độ đóng mở cao vì chúng ta điều động xung pwm ở tốc độ cao. Cho nên cái công tắc điện tử này phải có khả năng đóng mở thật nhanh và khả năng truyền điện lý tưởng giống như cái khóa cơ. Các bạn thấy rằng, cái khoá cơ, chỉ có đóng hoặc mở. Như vậy, nếu vẽ xung ra, thì cái khoá cơ khi đóng hoặc mở nó sẽ là một cái xung vuông vức. Nhưng mà, cái khoá điện tử, khi nó được kích đóng rồi, nó vẫn còn phải co giai đoạn quá độ để ổn định, và độ ổn định của nó ra sao? Và ví như ở đây, ngừơi ta thấy do đặc điểm của điện áp, nếu như trong chương trình điều khiển, chúng ta ra lệnh cùng lúc bật khoá trên bên trái, và tắt khoá dưới bên trái, trong khi khoá dưới bên trái đang bật. Như vậy, khi nó chưa kịp chuyển, giả sử khoá trên đóng, khoá dưới đóng (tức thời), trong cái đoạn tức thời đó, nó xảy ra hiện tượng ngắn mạch, và ngay lập tức, bùm!! Và giải pháp của người ta là thêm 4 con diode vào như sau.  Nói tóm lại, việc xây dựng cái mạch công suất điều khiển động cơ, hay nói nôm na là cái cầu H, chính là để làm 3 việc trên. Còn đây, F giới thiệu một hình ảnh về một mạch cầu H trên mạng, cho mọi người tham khảo (chỉ cần dùng keyword: H bridge, các bạn có thể tìm thấy rất nhiều mạch cầu H mẫu). Các bạn có thể đưa ra đây cùng phân tích, và anh Nam sẽ giúp các bạn.  Các bạn lưu ý, đây là những điều rất cơ bản, nhằm giới thiệu về nguyên lý làm việc của mạch cầu H, và những vấn đề nền tảng, còn lại việc thiết kế, phát triển, xin nhường lại cho các bạn. Nếu bạn nào có điều kiện, hãy vác máy OSC ra đo thử và quan sát thử các tín hiệu khi đóng và mở, các bạn sẽ thấy nhiều vấn đề hay ho nữa từ việc thiết kế này. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 26-06-2006 lúc 02:47 PM. |
|
|
|
|
26-06-2006, 09:15 AM
|
#45 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào mọi người,
hôm qua tớ có ra chợ Nhật Tảo tìm động cơ nhưng do chủ nhật nhiều cửa hàng đóng cửa nên không mua được. Hôm nay thấy có bác cho địa chỉ cụ thể để mua thì may quá, cảm ơn các bác nhiều nhen. Mình đang phấn đấu để sớm post mô hình lên cho các bác xem. À, mình cũng xin thông báo tên và địa chỉ cho anh F mọi người biết: Trần Thành Thanh Tùng, 539/75 cách Mạng Tháng 8, Phường 15, Quận 10, Tp Hồ Chí Minh. bluepine |
|
|
|
|
|
|


 falleaf
falleaf Linear Mode
Linear Mode

