
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 26-09-2006, 12:42 AM
26-09-2006, 12:42 AM
|
#301 |
|
Đệ tử 1 túi
Tham gia ngày: Sep 2006
Bài gửi: 15
: |
tôi mới tìm hiểu về pic và thấy ý kiến hay đấy .
|

|

|
|
26-09-2006, 10:20 AM
|
#302 | |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Hỏi về interrupt on change
Trích:
|
|
|
|
|
|
26-09-2006, 10:22 AM
|
#303 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Chào mọi người, cho em hỏi sao em không dùng được chức năng interrupt on change trên portb, em viết chương trình như thế này
....... #INT_RB void RB_int() { counted_round_value++; printf("%ld\t",counted_round_value);// hiển thị giá trị số lần ngắt về máy tính } void main() { enable_interrupts(GLOBAL); enable_interrupts(INT_RB); port_b_pullups(true); set_tris_b(0xf0); output_low(PIN_B0); while(true); } ..... em dùng 1 phím nhấn để thay đổi tín hiệu trên 1 chân (từ b4 đến b7) khi hiển thị về máy tính thì thấy giá trị số lần ngắt tăng liên tục mặt dù chưa nhấn phím. dòng lệnh port_b_pullups(true); để chống nhiễu do áp trôi trên portb, em đã thử bỏ đi mà kết quả vẫn không đổi. kiểm tra lại thì phím nhấn không vấn đề gì. |
|
|
|
|
27-09-2006, 03:02 AM
|
#304 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Bạn chọn ngắt cạnh lên hay cạnh xuống (điện trở kéo lên chắc là ngắt cạnh xuống). Bạn nên mắc điện trở kéo lên ở mạch ngoài như vậy ổn định hơn
Nếu nút nhấn chỉ mắc 1 chân RB0 thi bạn nên set_tris_b(0x10), chân Rb1-Rb3 ko xài Thực ra khi lúc mới học PIC viết ngắt ngoài thì bị lỗi khác (lúc chạy đúng lúc chạy sai) làm cho mình có cảm giác RB0-RB3 ngắt ko ổn định bằng RB7. |
|
|
|
|
27-09-2006, 11:01 AM
|
#305 | |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
Trích:
mến |
|
|
|
|
|
28-09-2006, 12:16 PM
|
#306 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
hỏi về hàm truyền động cơ DC
chào mọi người, khi tham khảo địa chỉ http://www.library.cmu.edu/ctms/ctms...or/digital.htm
em thấy hàm truyền động cơ DC có dạng với các đại lượng như sau: electrical resistance (R) = 1 ohm *electrical inductance (L) = 0.5 H *electromotive force constant (Ke=Kt) = 0.01 Nm/Amp *moment of inertia of the rotor (J) = 0.01 kg*m^2/s^2 *damping ratio of the mechanical system (b) = 0.1 Nms *input (V): Source Voltage *output (teta dot): Rotating speed khi tra trong trong datasheet của động cơ em (TS3078) thì thấy các đại lượng không giống với các đại lượng trên, cụ thể là không có các đại lượng damping ratio of the mechanical system (b), electromotive force constant (Ke=Kt), moment of inertia of the rotor (J), nhưng mà trong datasheet chỉ có các đại lượng như Rated Torque(TR), Torque Constant(KT), Armature Moment of Inertia(IR)  các anh cho hỏi các anh cho hỏiRated Torque(TR) ?= Rated Torque(TR) electromotive force constant (Ke=Kt) ?= Torque Constant(KT) moment of inertia of the rotor (J) ?= Armature Moment of Inertia(IR) (em chỉ so sánh thấy thứ nguyên giống nhau thôi) ai rành về thông số động cơ chỉ giùm nhé, em pót datasheet lên cho mọi người tham khảo luôn mến thay đổi nội dung bởi: falleaf, 28-09-2006 lúc 03:26 PM. |
|
|
|
|
28-09-2006, 06:46 PM
|
#307 |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
:  |
Câu trả lời là Yes cho cả 3 câu hỏi của em.
Vào đọc thêm ở đây: http://namqn.byethost7.com/Motor.php Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 thay đổi nội dung bởi: namqn, 26-10-2008 lúc 12:42 AM. |
|
|
|
|
28-09-2006, 10:46 PM
|
#308 | |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Trích:
Bạn sử dụng ngắt INT_RB như thế nào nếu ko phải là đưa tín hiệu tử mạch ngoài vào, ngắt INT_EXT cũng ngắt dựa trên tín hiệu của mạch ngoài, như vậy trong mạch bạn sử dụng thì INT_RB và INT_EXT gần giống nhau về cách gây ra ngắt là sự thay đổi trạng thái ở ngõ vào. Mình viết bài đó là để nói kinh nghiệm thới cùi bắp mới học PIC  . .thay đổi nội dung bởi: scentoflove, 28-09-2006 lúc 10:49 PM. |
|
|
|
|
|
03-10-2006, 11:55 AM
|
#309 |
|
Đệ tử 1 túi
Tham gia ngày: Sep 2006
Bài gửi: 15
: |
Bác F ơi . Tôi có 1 con Pic 16F877A và một mạch cầu H , Một động cơ 1 chiều .Tôi không biết viết chương trình trong CCS như thế nào để điều khiển được tốc độ của động cơ Bác F có thể giúp tôi ko ? cảm ơn Bác F.
|
|
|
|
|
03-10-2006, 02:15 PM
|
#310 | |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:  |
Trích:
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
06-10-2006, 12:19 PM
|
#311 |
|
Đệ tử 6 túi

Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Mạch điều khiển của mình thiết kế xong roài. Falleaf cho hỏi làm thế nào để post sơ đồ mạch vẽ bằng OrCAD10.5 lên diễn đàn? (Chuyển từ OrCAD sang ảnh JPG mà hình vẽ và các ký hiệu vẫn rõ ràng)
|
|
|
|
|
06-10-2006, 04:38 PM
|
#312 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Bạn nén tất cả thành file zip gửi lên diễn đàn bằng cách Tải file đính kèm.
Nếu bạn chỉ muốn gửi hình lên diễn đàn, thì bạn có thể dùng print screen để chụp hình màn hình lại, sau đó dán vào Paint, rồi cắt cái phần hình ra, lưu lại dạng JPEG, và gửi lên photobucket.com như gửi một hình bình thường. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
09-10-2006, 08:58 AM
|
#313 |
|
Đệ tử 6 túi
Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Đây là sơ đồ bộ điều khiển:
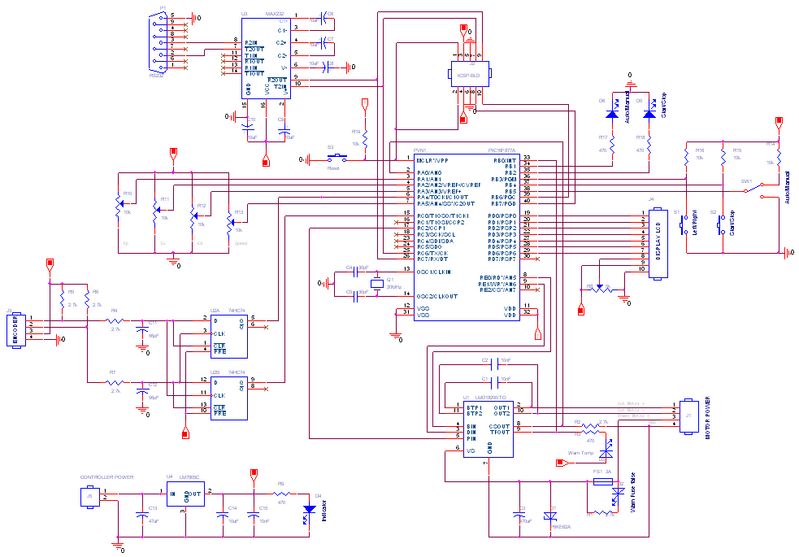 Phần công suất dùng chip LMD18200 Giao tiếp với PC qua RS232. Chuẩn ICSP và Bootloader của PICvietnam Hiển thị thông tin trên LCD 2x16 Có nút gạt chuyển chế độ manual và auto có nút bấm start/stop, quay trái quay phải và đèn báo tương ứng. Mạch flip-flop dùng để tăng , giảm số xung nhận được từ encoder khi quay thuận và nghịch (vì capture của PIC chỉ theo chiều tăng). Dùng 2 chip 74HC74. Dùng 4 biến trở để điều chỉnh hệ số Kp, Ki, Kd, tốc độ bằng tay. Các bạn thử xem với sơ đồ mạch như vậy còn có vấn đề gì nữa không?. file orCAD mình gửi kèm theo đây thay đổi nội dung bởi: tinhthanthep, 09-10-2006 lúc 09:02 AM. |
|
|
|
|
09-10-2006, 11:13 PM
|
#314 |
|
Đệ tử 2 túi

Tham gia ngày: Jul 2005
Bài gửi: 26
: |
Mạch điều khiển 6 motor đồng thời + current sensing
Các anh chị em cho ý kiến nhé. Cái này tôi đã thử với 1 motor chạy khá tốt, và ổn định.
|
|
|
|
|
14-10-2006, 03:28 PM
|
#315 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Cho hỏi là mọi người đã làm xong mạch cầu điều khiển động cơ, chạy ngon chưa? Bây giờ các bạn post mạch của mình lên mạng, và chương trình chạy thử, còn có những khúc mắc gì không?
Nhờ anh Nam tổng kết lại. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
|
|



 namqn
namqn falleaf
falleaf Linear Mode
Linear Mode

