
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Thực hành Bắt đầu làm một robot như thế nào? Mẹo vặt? Kỹ thuật? Công nghệ?... Hãy bắt tay vào việc... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
 21-08-2006, 01:07 AM
21-08-2006, 01:07 AM
|
#211 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Rất tốt rồi đó, em có thể gắn tải thêm vào và thử chụp hình cho mọi người xem phần tải luôn.
còn một người nữa nhận chip và đã làm mô hình rồi, khi nào nhận được thì báo lại cho mọi người nhé. Mô hình của hoanf đã tốt hơn lúc đầu rất nhiều, và lại rất đẹp. Như vậy, mô hình mẫu chúng ta đã có 3 mô hình mẫu của thành viên tự làm, 2 mô hình mẫu của Microchip làm, và chúng ta sẽ tiếp tục có các mô hình mẫu tiếp theo. Các thành viên cũng đã nhận chip rồi (còn chờ một người nữa confirm lại). Vậy thì mọi người phải xúc tiến nhanh phần thiết kế mạch điều khiển động cơ. Chú ý, cần xác định rõ dòng hoạt động của động cơ. Dùng đồng hồ đo A nối tiếp khi cấp áp cho động cơ chạy ở giá trị V_max, hoặc ước lượng thông qua việc đo điện trở của động cơ. Lấy giá trị đó nhân lên khoảng 1.5 đến 2 lần để xác định dòng đỉnh. Cần phải thiết kế bộ điều khiển động cơ có dòng đỉnh lớn hơn dòng đỉnh xác định được, và dòng hoạt động lớn hơn dòng hoạt động của động cơ. Đây là điều quan trọng nhất, còn các vấn đề khác anh Nam sẽ hướng dẫn mọi người làm chi tiết hơn. Bây giờ mình thật tập trung vào việc thiết kế một bộ mạch cầu H chuẩn nhé. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |

|

|
|
21-08-2006, 11:13 AM
|
#212 |
|
Đệ tử 1 túi
Tham gia ngày: Mar 2006
Bài gửi: 22
: |
Cac bac lam dep lam!
|
|
|
|
|
21-08-2006, 11:14 AM
|
#213 |
|
Đệ tử 6 túi
Tham gia ngày: Mar 2006
Bài gửi: 129
: |
Em nhận được rồi, cám ơn anh F. Mấy hôm nay học thi hè ko lên diễn đàn thường xuyên nên confirm trễ.
thay đổi nội dung bởi: scentoflove, 21-08-2006 lúc 11:16 AM. |
|
|
|
|
22-08-2006, 09:47 AM
|
#214 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Các bạn tiếp tục đưa các bản thiết kế của mình về mạch cầu H lên mạng để anh Nam hỗ trợ các bạn trong việc tính toán.
Thông số động cơ của mình, ai chưa nắm thì đưa các thông tin có thể có được lên mạng, để chúng ta cùng tìm cách ước lượng. Việc này rất cần thiết cho việc thiết kế bộ điều khiển. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-08-2006, 11:04 AM
|
#215 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
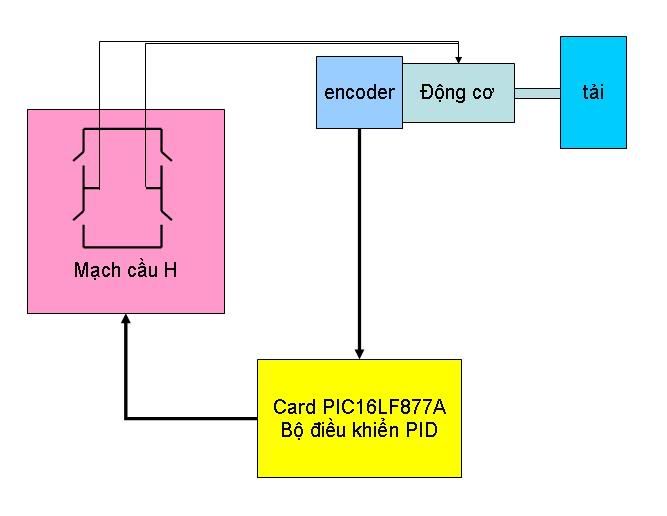 Nhìn vào hình này, các bạn đã thấy rõ ràng rằng chúng ta đã làm xong phần 1, ở phía trên, bao gồm động cơ, encoder và tải. Bây giờ việc tiếp theo là làm phần mạch cầu H. Mọi người cố gắng xúc tiến công việc thật nhanh. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-08-2006, 11:36 AM
|
#216 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
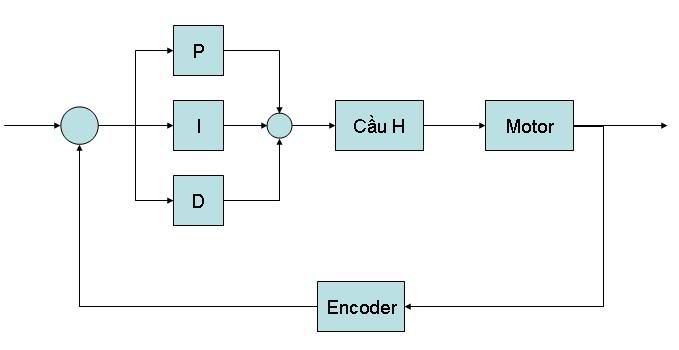 Hình này giúp các bạn từ các khối phần cứng liên hệ cụ thể với mô hình điều khiển một cách trực quan. Từ trước tới nay, điều khó khăn trên các lớp học, chính là việc dạy điều khiển chỉ có các sơ đồ khối, không hiểu sơ đồ khối đó là cái gì, làm cái gì?!! Thực sự F cũng đã gặp khó khăn khi cố gắng hình dung ra nó là cái gì, và mình phải làm nó như thế nào? Tất nhiên, mô hình điều khiển này chưa hoàn toàn đầy đủ, chúng ta sẽ phải làm nhiều thứ khác nữa, nhưng từ mô hình này, các bạn thấy rất đơn giản. Khối điều khiển PID, chính là cái card PIC16LF877A của các bạn, phần mạch cầu H là phần khuếch đại, phần động cơ, tín hiệu ra là góc quay hay vận tốc góc của động cơ, được đọc về bởi encoder, đây là ngõ hồi tiếp tín hiệu. Giá trị này sau đó được so sánh với giá trị đặt. Dựa trên sai số giữa giá trị đặt (giá trị mong muốn = vận tốc hoặc vị trí), chúng ta sẽ phải xác định xem cần phải tăng hay giảm độ rộng xung PWM trước khi đưa vào mạch cầu H. Nếu như giá trị đọc về của encoder nhỏ hơn giá trị đặt, như vậy rõ ràng chúng ta phải tăng PWM. Như vậy, tăng PWM là tăng bao nhiêu? Hoặc khi giá trị đặt lớn hơn giá trị đọc về của encoder, thì chúng ta phải giảm PWM, như vậy giảm bao nhiêu? Bộ điều khiển PID giúp chúng ta trả lời câu hỏi này. Khi có giá trị hồi tiếp, giá trị đặt, và biết được sai số của chúng ở từng thời điểm, chúng ta sẽ điều khiển được tín hiệu điều khiển để nó tăng giảm bao nhiêu là hợp lý. Như vậy, mọi bộ điều khiển tự động (automatic controller) đều làm công việc này, tăng giảm bao nhiêu thì vừa. Những bộ điều khiển phức tạp, làm nhiều việc hơn, vì nó có thể có nhiều ngõ vào, nhiều ngõ ra, nhiều ngõ hồi tiếp hơn, nhưng suy cho cùng, nói một cách nôm na, cũng chỉ là tăng hay giảm bao nhiêu thì vừa. Nếu như chúng ta dùng cách điều khiển liệt kê, vd: -1000 xung, -999 xung, - 998 xung.... 0 xung, 1 xung, ... 999 xung, 1000 xung... Chúng ta liệt kê hết tất cả các giá trị sai lệch này ra, và áp cho nó một giá trị điều khiển (độ rộng PWM phù hợp với từng giá trị sai lệch), thì chúng ta thực sự không cần bộ điều khiển PID làm gì nữa. Nhưng vấn đề chúng ta cần bộ điều khiển PID để biết xem được nếu -1000 xung sai lệch thì giá trị đó bằng bao nhiêu? Đó là điểm thứ nhất. Điểm thứ hai, về mặt lập trình, chúng ta không thể ngồi liệt kê hết từng trường hợp như vậy. Thực chất, trong một số trường hợp điều khiển, giả sử như chỉ có khoảng 100 trường hợp, nếu mà cho tính toán PID với số thực, quả thực rất lâu, người ta có thể tính toán ra ngoài trước, và khi lập trình cho sản phẩm, người ta đưa bảng tra vào luôn. Khi đó đáp ứng sẽ rất nhanh, vì nó không phải tính toán bộ điều khiển PID nữa. Nhưng nói như vậy là F nói một cách hình dung, cho bộ điều khiển P thôi, không phải PID, vì điều khiển PID còn liên quan đến độ sai lệch trước đó, và độ sai lệch sau đó. Nếu đem 100 trường hợp, và liệt kê, thì P sẽ là 100 trường hợp, I sẽ 100 trường hợp, D sẽ 100 trường hợp. Tổ hợp của các trường hợp này là bao nhiêu? Thực sự F không dám tính toán, và không dám liệt kê. Đó là lý do vì sao người ta phải dùng bộ điều khiển mà không dùng phương pháp liệt kê. Đôi nét dạo đầu và những khái niệm nôm na về bộ điều khiển như vậy, F không khuyến khích mọi người tập trung vào phần điều khiển vào lúc này, nhưng F biết mọi người cũng đang đọc từ từ về điều khiển PID, nhất là những người đang theo dõi luồng này mà không làm mô hình, vì họ muốn học dạng lý thuyết, hoặc không có thời gian, hoặc điều kiện tài chính để tham gia làm mô hình... Điều này sẽ giúp cho các bạn hình dung một cách trực quan hơn những gì chúng ta đang làm, và một chút gì đó về lý lẽ để các bạn cảm thấy dễ hiểu hơn về vấn đề điều khiển. Ở đây, chúng ta chỉ đang tiếp cận với Automatic Control, chứ chúng ta chưa tiếp cận đến Intelligent Control, cho nên F chỉ đưa khái niệm tăng giảm ngõ ra như trên, để tránh tình trạng như trong phần Kalman, có bạn nghiên cứu về vấn đề này, sẽ vào thảo luận rằng khái niệm hình dung này không chính xác. Thực sự là không có cái gì hoàn toàn chính xác, theo F nghĩ vậy. Cho nên, làm thế nào để hiểu được nó một cách đơn giản nhất, truyền đạt lại nó một cách đơn giản nhất, thảo luận với nhau một cách đơn giản nhất, đó là cách mà chúng ta sẽ làm và xây dựng ở đây. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-08-2006, 11:31 PM
|
#217 |
|
Đệ tử 3 túi
Tham gia ngày: Feb 2006
Bài gửi: 50
: |
Chào cả nhà !
Mấy hôm nay bận đi làm nên đến hôm nay Hiếu mới post được mấy cái tải cho các bạn xem được. |
|
|
|
|
22-08-2006, 11:41 PM
|
#218 |
|
Đệ tử 3 túi
Tham gia ngày: Feb 2006
Bài gửi: 50
: |
Cho Hiếu hỏi về các thông số của động cơ
HITACHI DC MOTOR Type : D04E200E100 Volts : 24 VDC Ricoh P/N A422 5300 MFG. NO. C 91.4 Động cơ có tất cả 6 dây - 2 dây (màu Vàng và Trắng) cấp nguồn cho motor - 4 dây (Vàng, trắng , xanh lá , đỏ ) từ encoder ra |
|
|
|
|
24-08-2006, 02:13 PM
|
#219 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Cách nối dây của các loại encoder, loại 4 dây, 5 dây, 6 dây, 8 dây, 10 dây... đã được nói ở các bài trước trong luồng này, bạn tìm đọc lại các bài trước nhé.
Để đo dòng hoạt động của động cơ, bạn cấp nguồn 24 - 25V vào động cơ (vì động cơ của bạn hoạt động ở 24V, cho nên cấp hơi cao hơn một chút, khoảng 25V, hoàn toàn không ảnh hưởng). Bạn lấy đồng hồ đo dòng, đo trực tiếp dòng động cơ. Từ dòng động cơ đó, nhân lên khoảng 1.5 đến 2 lần. Tốt nhất là khi thiết kế mạch cầu H, cứ nhân 2 lên, thì sẽ ra dòng đỉnh. An toàn nữa thì nhân 2.5. Vd, dòng bạn đo được là 1A, như vậy, mạch cầu H bạn phải thiết kế là 2A. Đo điện trở, lấy đồng hồ đo đo trực tiếp trên động cơ. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
28-08-2006, 06:49 PM
|
#220 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2006
Bài gửi: 14
: |
Chào các bác. Em mới mua đc 1 cái động cỏ. Nhưng tìm mãi không được datasheet của nó, buồn quá.
Trên DC của em có ghi là: Minertia P Motor Seies UGFMED-03DRI11 829511-1 AX070021A 23.7V 98.11 Có bác nào biết giúp em với. |
|
|
|
|
28-08-2006, 08:47 PM
|
#221 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Tốt nhất nên dự đoán. Động cơ của bạn hoạt động ở điện áp 24V, 98.11 mình đoán chắc là moment xoắn lớn nhất, chưa thể dự đoán được đơn vị theo SI hay theo hệ Anh.
Nếu như có được điện áp hoạt động, hoàn toàn có thể đo được L, và R bằng máy đo. Máy đo L hôm nọ F đi hỏi ngoài Nhật Tảo giá khoảng 300K. Đo R thì đơn giản rồi. Từ điện áp hoạt động và R, suy ra dòng. Từ dòng động cơ, tạm thời chúng ta thiết kế mạch cầu H với các thông số dòng. Còn khi điều khiển, F sẽ gửi tài liệu hướng dẫn xác định các thông số như hệ số xuất điện động, dòng đỉnh, tải đỉnh, phương pháp thực nghiệm để xác định sau. Chúc vui.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
28-08-2006, 11:29 PM
|
#222 |
|
Đệ tử 1 túi
Tham gia ngày: Jul 2006
Bài gửi: 14
: |
Cam on anh F. Em cung doan la the. Nhung ma thong so vong quay cua encoder thi em chiu. Cai do minh can phai biet chu a. The nay khong kheo lai phai kiem con khac thoi. Khong biet co thao ra dc khong , ma thao ra thi co the biet dc vong quay co no khong?
|
|
|
|
|
28-08-2006, 11:37 PM
|
#223 | |
|
Trưởng lão PIC bang
Tham gia ngày: Feb 2006
Nơi Cư Ngụ: Tp. HCM, Việt Nam
Bài gửi: 3,025
: |
Trích:
Có thể mở phần encoder, đếm thử số vạch cho 1/8 vòng chẳng hạn (nếu có thể đếm được). Thân,
__________________
Biển học mênh mông, sức người có hạn. Đang gặp vấn đề cần được giúp đỡ? Hãy dành ra vài phút đọc luồng sau: http://www.picvietnam.com/forum/showthread.php?t=1263 |
|
|
|
|
|
29-08-2006, 10:34 AM
|
#224 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Đếm vòng encoder, nếu loại có 5 dây thì đơn giản, vì nó có kênh Z (hoặc I, theo một số tài liệu khác sử dụng ký hiệu I). Như vậy, bạn chỉ cần đọc giá trị đầu tiên, sau đó đưa vào chương trình đếm, đếm cho đến khi gặp lại Z một lần nữa thì ngưng.
Nếu như loại có 4 dây, điều duy nhất có thể làm là tháo cái encoder ra, đánh dấu ở một xung và đếm như anh Nam nói. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
30-08-2006, 09:16 AM
|
#225 |
|
Đệ tử 3 túi
Tham gia ngày: Jun 2006
Bài gửi: 53
: |
chào mọi người,
Cảm ơn anh F hướng dẫn, bọn em đang thực hiện phần đếm xung của động cơ (do cái động cơ của em không tìm được datasheet của encoder), em sẽ thực hiện theo cách anh hướng dẫn để kiểm tra lại cho chắc. Còn cái mô hình mới của bọn em khi chạy không tải thì rất êm nhưng gắn cục tải vào thì nó vẫn còn hơi bị rung mặc dù mô hình rất nặng (chắc khoảng hơn 5kg). |
|
|
|
|
|
|


 falleaf
falleaf namqn
namqn
 Linear Mode
Linear Mode

