
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Cơ bản về vi điều khiển và PIC Những bài hướng dẫn cơ bản nhất để làm quen với vi điều khiển PIC |
|
|
Ðiều Chỉnh | Xếp Bài |
 30-05-2009, 12:24 PM
30-05-2009, 12:24 PM
|
#1 |
|
Đệ tử 7 túi
Tham gia ngày: Jul 2007
Nơi Cư Ngụ: Đà Nẵng
Bài gửi: 188
: |
Đà nẵng vào đây cùng thảo luận về PIC
Đầu tiên là t đưa ra 2 mạch nạp PIC vô cùng dễ làm nhưng tốc độ nạp hơn GTB-USB Lite
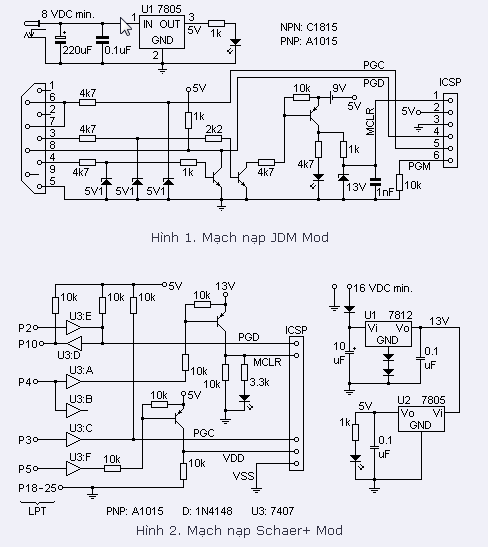 sau đó , u tải file nì về http://www.mediafire.com/download.php?tzkzcccmit2 giải nén , coppy + paste vô thư mục C:\Program Files\WinPic800\Hardware. phần mềm để nạp PIC hiện t đang dùng là WINPIC800 v3.61 http://www.mediafire.com/download.php?w0zyqqtmmyq sau khi cài đặt , vô chương trình WINPIC800 : - Language : english - Setting/hardware : nếu mạch JDM mod(hình 1) thì chọn JDM mod , còn nếu mạch hình 2 thì chon Sch+ . Xong nhấn Appy edits - gắn mạch nạp vô , chọn devices/hardware test . Nếu mạch làm đúng thì có bảng hardware test : OK Theo kinh nghiệm làm tùm lum mạch nạp thì 2 mạch này nạp đc cả nùi con PIC. Ráp là chạy . Tin tưởng đi ..... |

|

|
|
|






 Threaded Mode
Threaded Mode