
|
|
Tài trợ cho PIC Vietnam |
||||||||
| Cơ cấu chấp hành (Actuator) Động cơ DC, AC, động cơ không chổi than, động cơ không cảm biến... |
 |
|
|
Ðiều Chỉnh | Xếp Bài |
|
|
 02-06-2005, 03:52 AM
02-06-2005, 03:52 AM
|
#1 |
|
PIC Bang chủ

Tham gia ngày: May 2005
Bài gửi: 2,631
:   |
Encoder: absolute và incremental? Dùng loại nào?
Trước khi đặt câu hỏi đó, các bạn download chương trình này về, tuần sau chúng ta sẽ nói về absolute encoder và incremental encoder.
Encoder_Design.exe Đây là chương trình thiết kế cả hai loại absolute encoder và incremental encoder. Các bạn xem cho vui, khi nào tôi có thời gian sẽ post bài về nó.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |

|

|
|
02-06-2005, 10:04 PM
|
#2 |
|
Đệ tử 6 túi

Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Bác falleaf cho hỏi sao tôi chạy file này thì máy tính lại báo: encoder_design.exe is not a valid Win32 application. ( Máy tính của tôi sử dụng hệ điều hành windows XP SP1 ). Thanhs!
|
|
|
|
|
02-06-2005, 10:42 PM
|
#3 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Có lẽ do bạn cài đặt nhiều thứ quá trong máy tính, nên máy tính của bạn gặp trục trặc, hoặc khi download bằng dialup, đường truyền không tốt, dữ liệu down về bị hư...
Mình đã thử download lại file này, và chạy tại chỗ. File chạy tốt, máy mình dùng XP SP2, vẫn chạy bình thường. Bạn thử kiểm tra lại nhé.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
30-07-2005, 05:54 PM
|
#4 |
|
Banned
Tham gia ngày: Jun 2005
Bài gửi: 31
: |
Cho em hỏi bác falleaf một chút,em thấy chương trình Encoder_design thiết kế nhanh thật,nhưng khi in ra để chế thì lai không nét một chút nào,cho nên không chình xac.Em thử chỉ thiết kế encoder 1 lỗ thì nó lại ra thế này,em chẳng hiểu nỗi
|
|
|
|
|
10-08-2005, 10:22 AM
|
#5 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Thì nó đúng là encoder 1 lỗ rồi còn gi?
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
11-08-2005, 07:50 PM
|
#6 |
|
Đệ tử 6 túi
Tham gia ngày: Jun 2005
Bài gửi: 141
: |
Cái lỗ tròn nhỏ ở giữa của cái đĩa là để xỏ qua trục của động cơ. Còn phần vòng cung trắng là phần cắt đi của đĩa để tín hiệu có thể đí qua được. Như vậy trong một vòng quay của trục thì chỉ có 1 lần tín hiệu được truyền qua.
|
|
|
|
|
16-08-2005, 10:29 PM
|
#7 |
|
Đệ tử 2 túi
Tham gia ngày: Aug 2005
Bài gửi: 30
: |
phiên bản 2.0 của encoder designer
Các bác vào đây, chắc là phiên bản 2.0 của encoder designer!
http://users.adelphia.net/~skbosko/Robot_top.htm Bác falleaf giới thiệu tí về cách thực hiện một bộ encoder đi! dùng cảm biến thì chắc giống mắt dò đường của robot! còn về đếm (đo khoảng cách) với VDK??? |
|
|
|
|
16-08-2005, 10:47 PM
|
#8 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Sơ lược về encoder
Encoder mục đích dùng để quản lý vị trí góc của một đĩa quay, đĩa quay có thể là bánh xe, trục động cơ, hoặc bất kỳ thiết bị quay nào cần xác định vị trí góc.
Encoder được chia làm 2 loại, absolute encoder và incremental encoder. Tạm dịch là encoder tuyệt đối và encoder tương đối. Chữ encoder tuyệt đối dịch theo nguyên văn, nhưng vì tiếng Việt mình cái gì có 2 loại, thì loại còn lại được dịch ngược lại với loại kia. Cho nen dịch là encoder tương đối cho incremental encoder. Nếu dịch sát nghĩa, khi ta đọc absolute encoder, có nghĩa là encoder tuyệt đối, tức là tín hiệu ta nhận được, chỉ rõ ràng vị trí của encoder, chúng ta không cần xử lý gì thêm, cũng biết chính xác vị trí của encoder. Còn incremental encoder, là loại encoder chỉ có 1, 2, hoặc tối đa là 3 vòng lỗ. Các bạn hình dung thế này, nếu bây giờ các bạn đục một lỗ trên một cái đĩa quay, thì cứ mỗi lần đĩa quay 1 vòng, các bạn sẽ nhận được tín hiệu, và các bạn đã biết đĩa quay một vòng. Nếu bây giờ các bạn có nhiều lỗ hơn, các bạn sẽ có được thông tin chi tiết hơn, có nghĩa là đĩa quay 1/4 vong, 1/8 vòng, hoặc 1/n vòng, tùy theo số lỗ nằm trên incremental encoder. Cứ mỗi lần đi qua một lỗ, chúng ta phải lập trình để thiết bị đo đếm lên 1. Do vậy, encoder loại này có tên incremental encoder (encoder tăng lên 1 đơn vị). 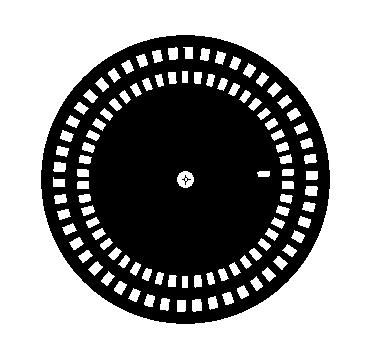 Nguyên lý hoạt động cơ bản của encoder, LED và lỗ Nguyên lý cơ bản của encoder, đó là một đĩa tròn xoay, quay quanh trục. Trên đĩa có các lỗ (rãnh). Người ta dùng một đèn led để chiếu lên mặt đĩa. Khi đĩa quay, chỗ không có lỗ (rãnh), đèn led không chiếu xuyên qua được, chỗ có lỗ (rãnh), đèn led sẽ chiếu xuyên qua. Khi đó, phía mặt bên kia của đĩa, người ta đặt một con mắt thu. Với các tín hiệu có, hoặc không có ánh sáng chiếu qua, người ta ghi nhận được đèn led có chiếu qua lỗ hay không. Khi trục quay, giả sử trên đĩa chỉ có một lỗ duy nhất, cứ mỗi lần con mắt thu nhận được tín hiệu đèn led, thì có nghĩa là đĩa đã quay được một vòng. Đây là nguyên lý rất cơ bản của encoder. Tuy nhiên, những vấn đề được đặt ra là, làm sao để xác định chính xác hơn vị trí của đĩa quay (mịn hơn) và làm thế nào để xác định được đĩa đang quay theo chiều nào? Đó chính là vấn đề để chúng ta tìm hiểu về encoder. Hình sau sẽ minh họa nguyên lý cơ bản của hoạt động encoder. 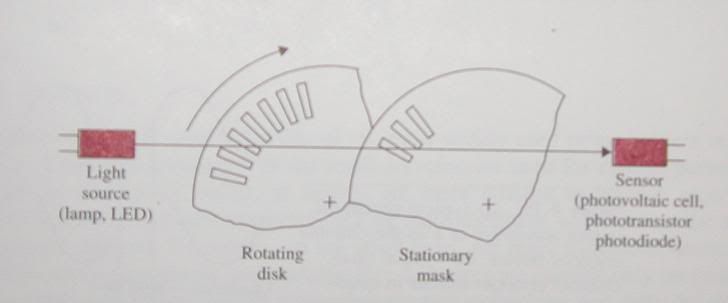 Các bạn thấy trong hình, có một đĩa mask, không quay, đó là đĩa cố định, thực ra là để che khe hẹp ánh sáng đi qua, giúp cho việc đọc encoder được chính xác hơn mà thôi. Chúng tôi không để cập đến đĩa mặt nạ này ở đây. Hoạt động của hai loại encoder này như thế nào? 1) Absolute encoder Vấn đề chúng ta sẽ quan tâm ở đây, chính là vấn đề về độ mịn của encoder, có nghĩa là làm thế nào biết đĩa đã quay 1/2 vòng, 1/4 vòng, 1/8 vòng hay 1/n vòng, chứ không phải chỉ biết đĩa đã quay được một vòng. Quay lại bài toán cơ bản về bit và số bit, chúng ta xem xét vấn đề theo một cách hoàn toàn toán học nhé: Với một số nhị phân có 2 chữ số, chúng ta sẽ có 00, 01, 10, 11, tức là 4 trạng thái. Điều đó có nghĩa là với 2 chữ số, chúng ta có thể chia đĩa encoder thành 4 phần bằng nhau. Và khi quay, chúng ta sẽ xác định được độ chính xác đến 1/4 vòng. Tương tự như vậy, nếu với một số có n chữ số, chúng ta sẽ xác định được độ chính xác đến 1/(2^n) vòng. Thế làm sao để xác định 2^n trạng thái này của đĩa encoder? Các bạn xem hình sau: 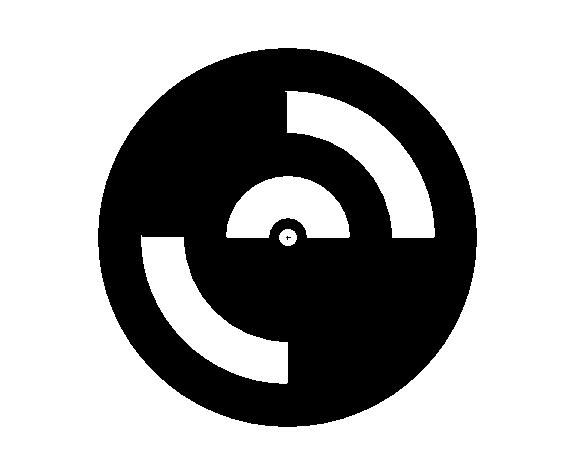 Ở đây, tôi đưa ra ví dụ với đĩa encoder có 2 vòng đĩa. Các bạn sẽ thấy rằng, ở vòng trong cùng, có một rãnh rộng bằng 1/2 đĩa. Vòng phía ngoài, sẽ có 2 rãnh nằm đối diện nhau. Như vậy, chúng ta cần 2 đèn led để phát xuyên qua 2 vòng lỗ, và 2 đèn thu. Giả sử ở vòng lỗ thứ nhất (trong cùng), đèn đọc đang nằm ở vị trí có lỗ hở, thì tín hiệu nhận được từ con mắt thu sẽ là 1. Và ở vòng lỗ thứ hai, thì chúng ta đang ở vị trí không có lỗ, như vậy con mắt thu vòng 2 sẽ đọc được giá trị 0. Và như vậy, với số 10, chúng ta xác định được encoder đang nằm ở góc phần tư nào, cũng có nghĩa là chúng ta quản lý được độ chính xác của đĩa quay đến 1/4 vòng. Trong ví dụ trên, nếu đèn LED đọc được 10, thì vị trí của LED phải nằm trong góc phần tư thứ hai, phía trên, bên trái. Kết quả, nếu đĩa encoder có đến 10 vòng lỗ, thì chúng ta sẽ quản lý được đến 1/(2^10) tức là đến 1/1024 vòng. Hay người ta nói là độ phân giải của encoder là 1024 xung trên vòng (pulse per revolution - ppr). Sau đây là ví dụ abosulte encoder 8 vòng lỗ: 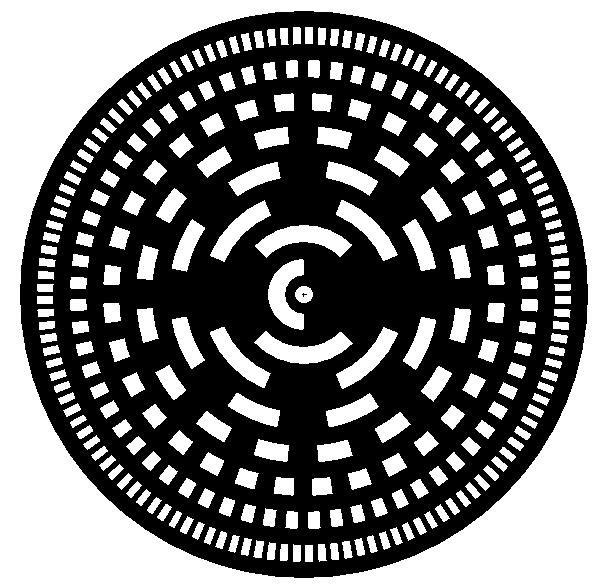 Vậy cách thiết kế absolute encoder như thế nào? Các bạn luôn chú ý rằng, để thiết kế encoder tuyệt đối, người ta luôn vẽ sao cho bit thứ N (đối với encoder có N vòng lỗ) nằm ở trong cùng, có nghĩa là lỗ lớn nhất có góc rộng 180 độ, nằm trong cùng. Bởi vì chúng ta thấy rằng, bit0 (nếu xem là số nhị phân) sẽ thay đổi liên tục mỗi 1/2^N vòng quay, vì thế, chúng ta cần rất nhiều lỗ. Nếu đặt ở trong thì không thể nào vẽ được, vì ở trong bán kính nhỏ hơn. Ngoài ra, nếu đặt ở trong, thì về kết cấu cơ khí, nó quá gần trục, và quá nhiều lỗ, sẽ rất yếu. Vì hai điểm này, nên bit0 luôn đặt ở ngoài cùng, và bitN-1 luôn đặt trong cùng như hình trên. Rất nhiều người thắc mắc về cách thực tế để vẽ encoder như thế nào. Tuy nhiên, kể từ khi có chương trình thiết kế encoder này, tôi cho rằng chúng ta không nên quan tâm đến vấn đề đó nữa. Chỉ cần hiểu nó hoạt động ra sao, rồi sau đó chúng ta dùng chương trình này để vẽ. Lười quá, mai pót tiếp ...hehhee...
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? thay đổi nội dung bởi: falleaf, 26-08-2005 lúc 10:52 PM. |
|
|
|
|
21-08-2005, 09:03 AM
|
#9 |
|
Đệ tử 2 túi
Tham gia ngày: Aug 2005
Bài gửi: 30
: |
bác post tiếp cho anh em xem đi, hay lắm!
|
|
|
|
|
26-08-2005, 10:46 PM
|
#10 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
encoder (tiếp theo và hết)
2) Incremental encoder
Nhận thấy một điều rằng, encoder tuyệt đối rất có lợi cho những trường hợp khi góc quay là nhỏ, và động cơ không quay nhiều vòng. Khi đó, việc xử lý encoder tuyệt đối trở nên dễ dàng cho người dùng hơn, vì chỉ cần đọc giá trị là chúng ta biết ngay được vị trí góc của trục quay. Tuy nhiên, nếu động cơ quay nhiều vòng, điều này không có lợi, bởi vì khi đó, chúng ta phải xử lý để đếm số vòng quay của trục. Ngoài ra, như các bạn thấy đó, nếu thiết kế encoder tuyệt đối, chúng ta cần quá nhiều vòng lỗ, và dẫn tới giới hạn về kích thước của encoder, bởi vì việc gia công chính xác các lỗ quá nhỏ là không thể thực hiện được. Chưa kể rằng việc thiết kế một dãy đèn led và con mắt thu cũng ảnh hưởng rất lớn đến kích thước giới hạn này. Theo kinh nghiệm của cá nhân tôi, tôi thấy encoder 8 bit là đã rất chi tiết rồi, và ở trường DHBKHCM có loại encoder 12bit đã là loại tốt nhất mà tôi biết. Tôi chưa thấy loại encoder tuyệt đối nào 16 bit cả, và cũng không có ý định tìm nó trên internet. Độ chính xác của encoder 12 bit đã là 1/4096 rồi. Tuy nhiên, điều này được khắc phục bằng incremental encoder một cách khá đơn giản. Chính vì vậy, ngày nay, đa số người ta sử dụng incremental encoder trong những ứng dụng hiện đại.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
22-09-2005, 12:14 PM
|
#11 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
Hoạt động của incremental encoder
Thật đơn giản, incremental encoder, sẽ tăng 1 đơn vị khi một lần lên xuống của cạnh xung.
Các bạn xem hình encoder sau: 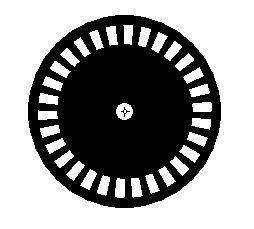 Các bạn thấy rằng, cứ mỗi lần quay qua một lỗ, thì encoder sẽ tăng một đơn vị trong biến đếm. Tuy nhiên, một vấn đề là làm sao để biết được encoder quay hết một vòng? Nếu cứ đếm vô hạn như thế này, thì chúng ta không thể biết được khi nào nó quay hết một vòng. Nếu bây giờ các bạn đếm số lỗ encoder để biết nó đã quay một vòng, thì nếu với encoder 1000 lỗ chắc các bạn sẽ đếm đến sáng luôn. Chưa kể, mỗi lần có những rung động nào đó mà ta không quản lý được, encoder sẽ bị sai một xung. Khi đó, nếu hoạt động lâu dài, sai số này sẽ tích lũy, ngày hôm nay sai một xung, ngày hôm sau sai một xung. Đến cuối cùng, có thể động cơ quay 2 vòng rồi các bạn mới đếm được 1 vòng. Để tránh điều tai hại này xảy ra, người ta đưa vào thêm một lỗ định vị để đếm số vòng đã quay của encoder. Như vậy, cho dù có lệch xung, mà chúng ta thấy rằng encoder đi ngang qua lỗ định vị này, thì chúng ta sẽ biết là encoder đã bị đếm sai ở đâu đó. Nếu vì một rung động nào đó, mà chúng ta không thấy encoder đi qua lỗ định vị, vậy thì từ số xung, và việc đi qua lỗ định vị, chúng ta sẽ biết rõ hiện tượng sai của encoder. Đây là hình encoder có lỗ định vị:  Tuy nhiên, một vấn đề lớn nữa là, làm sao chúng ta biết encoder đang xoay theo chiều nào? Bởi vì cho dù xoay theo chiều nào, thì tín hiệu encoder cũng chỉ là các xung đơn lẻ và xoay theo hai chiều đều giống nhau. Chính vì vậy, người ta đặt thêm một vòng lỗ ở giữa vòng lỗ thứ 1 và lỗ định vị như hình sau: 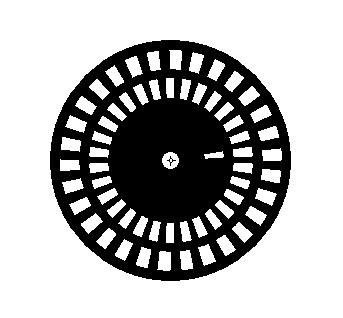 Chú ý rằng, vị trí góc của các lỗ vòng 1 và các lỗ vòng 2 lệch nhau. Các cạnh của lỗ vòng 2 nằm ngay giữa các lỗ vòng 1 và ngược lại. Chúng ta sẽ khảo sát tiếp vấn đề encoder trong phần tín hiệu xung để hiểu rõ hơn về encoder. Tuy nhiên, các bạn sẽ thấy một điều rằng, thay vì làm 2 vòng encoder, và dùng 2 đèn LED đặt thẳng hàng, thì người ta chỉ cần làm 1 vòng lỗ, và đặt hai đèn LED lệch nhau. Kết quả, các bạn sẽ thường thấy các encoder có dạng như hình 2: Đây là dạng encoder phổ biến nhất hiện nay. Chúng ta sẽ xem tiếp phần tín hiệu xung ở phần sau.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
25-09-2005, 02:42 PM
|
#12 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
http://cp.literature.agilent.com/lit...988-8045EN.pdf
Đây là datasheet của encoder HEDs9700 mà các bạn thường gặp. Xem qua datasheet này, các bạn sẽ hình dung rõ hơn về thực tế của các thông số encoder. Các bạn lưu ý rằng, đây chỉ là con mắt đọc, có nghĩa là bộ phận LED phát và thu, chứ không bao gồm đĩa encoder. Đối với mỗi loại optical encoder này, nó có một độ phân giải nhất định, và sẽ phù hợp với một số loại đĩa encoder nhất định.
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
06-10-2005, 12:15 AM
|
#13 |
|
PIC Bang chủ
Tham gia ngày: May 2005
Bài gửi: 2,631
: |
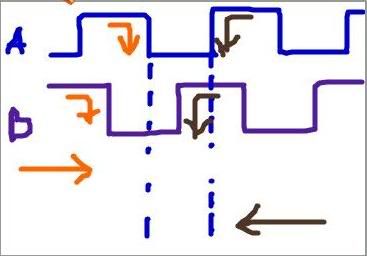 Hình trên là hình xung incremental encoder. Các bạn thấy rằng nếu như khi xung A đang từ mức cao xuống mức thấp, mà lúc đó B đang ở mức thấp, thì chúng ta sẽ xác định được chiều chuyển động của encoder theo chiều mũi tên màu cam. Nếu A đang từ mức cao xuống mức thấp, mà B đang ở mức cao, thì chúng ta sẽ biết encoder đang quay theo chiều màu nâu. Chúc vui
__________________
Công ty TNHH Thương mại và Giao nhận R&P store.hn@rpc.vn - store.hcm@rpc.vn Học PIC như thế nào? |
|
|
|
|
07-10-2005, 09:49 PM
|
#14 |
|
Nhập môn đệ tử
Tham gia ngày: Sep 2005
Bài gửi: 8
: |
anh ơi !
chỗ nào mua encoder tin cậy trong thành phố vậy ! thầy em nói có encoder seconde hand ở Vĩnh Viễn nhưng em đi mua DC vài lần mà chưa gặp bao giờ . ủa mà anh còn ở VN ko vậy ! |
|
|
|
|
15-10-2005, 06:17 AM
|
#15 | |
|
Banned
Tham gia ngày: Jun 2005
Bài gửi: 31
: |
Trích:
|
|
|
|
|
|
|
|
 Similar Threads
Similar Threads
|
||||
| Ðề tài | Người gửi | Chuyên mục | Trả lời | Bài mới |
| Mạch đếm dùng cho encoder | thaychua | Cảm biến | 23 | 17-04-2015 12:54 AM |
| Encoder | falleaf | Cảm biến | 7 | 09-05-2012 03:16 AM |
| Encoder: absolute và incremental? Dùng loại nào? | falleaf | Cảm biến | 40 | 21-05-2011 01:55 PM |
| Các vấn đề về encoder? | caonam | Cơ cấu chấp hành (Actuator) | 14 | 25-11-2010 12:01 PM |
| cần mua absolute rotary encoder | kienvq | Tìm mua sản phẩm | 3 | 11-08-2006 09:44 PM |


 falleaf
falleaf
 Hybrid Mode
Hybrid Mode
