Đây là sơ đồ bộ điều khiển:
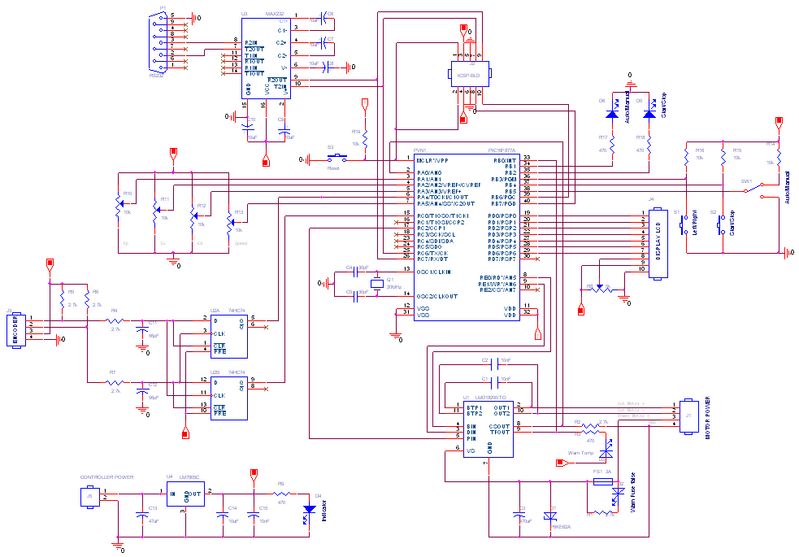
Phần công suất dùng chip LMD18200
Giao tiếp với PC qua RS232.
Chuẩn ICSP và Bootloader của PICvietnam
Hiển thị thông tin trên LCD 2x16
Có nút gạt chuyển chế độ manual và auto
có nút bấm start/stop, quay trái quay phải và đèn báo tương ứng.
Mạch flip-flop dùng để tăng , giảm số xung nhận được từ encoder khi quay thuận và nghịch (vì capture của PIC chỉ theo chiều tăng). Dùng 2 chip 74HC74.
Dùng 4 biến trở để điều chỉnh hệ số Kp, Ki, Kd, tốc độ bằng tay.
Các bạn thử xem với sơ đồ mạch như vậy còn có vấn đề gì nữa không?.
file orCAD mình gửi kèm theo đây